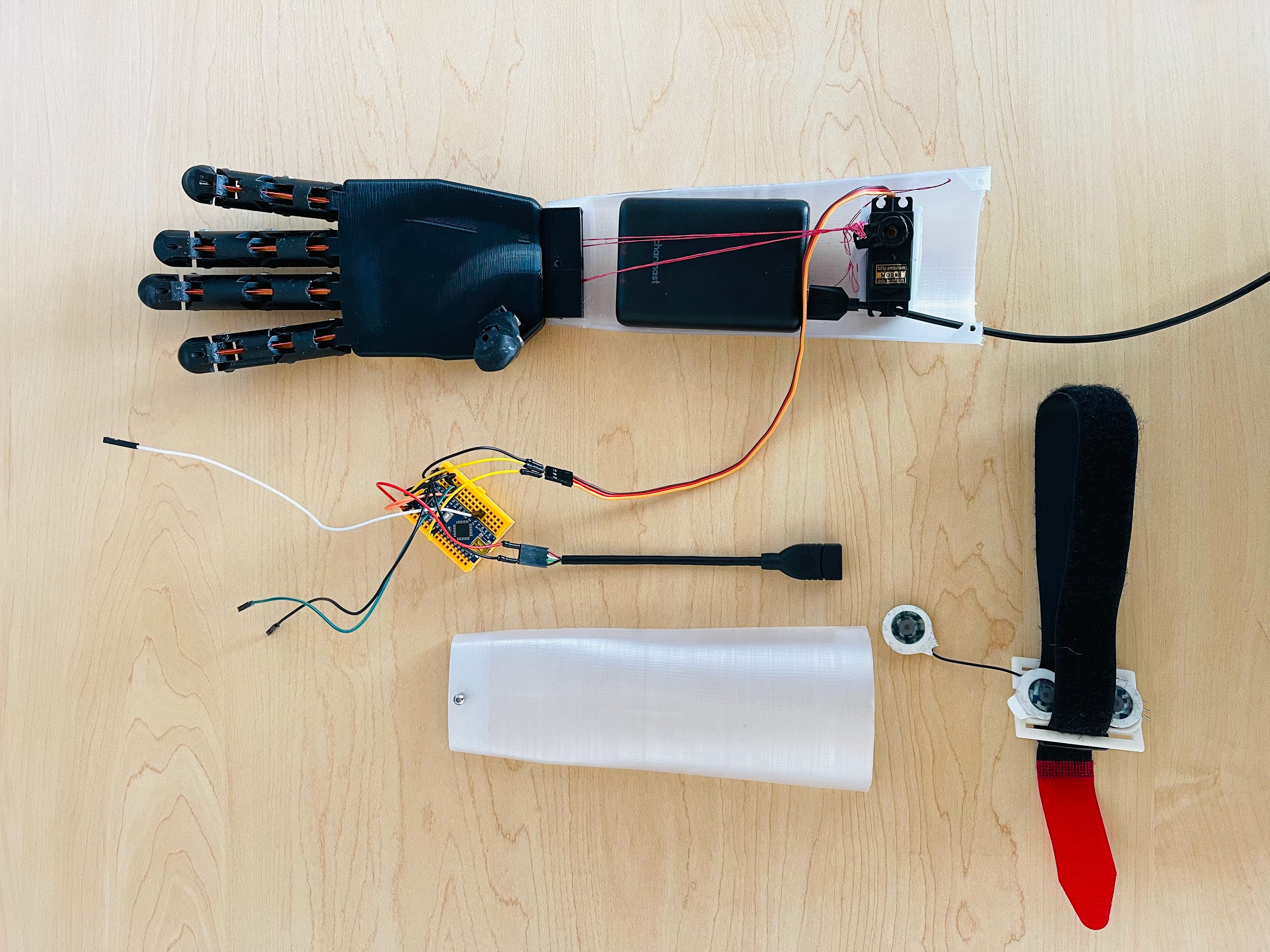
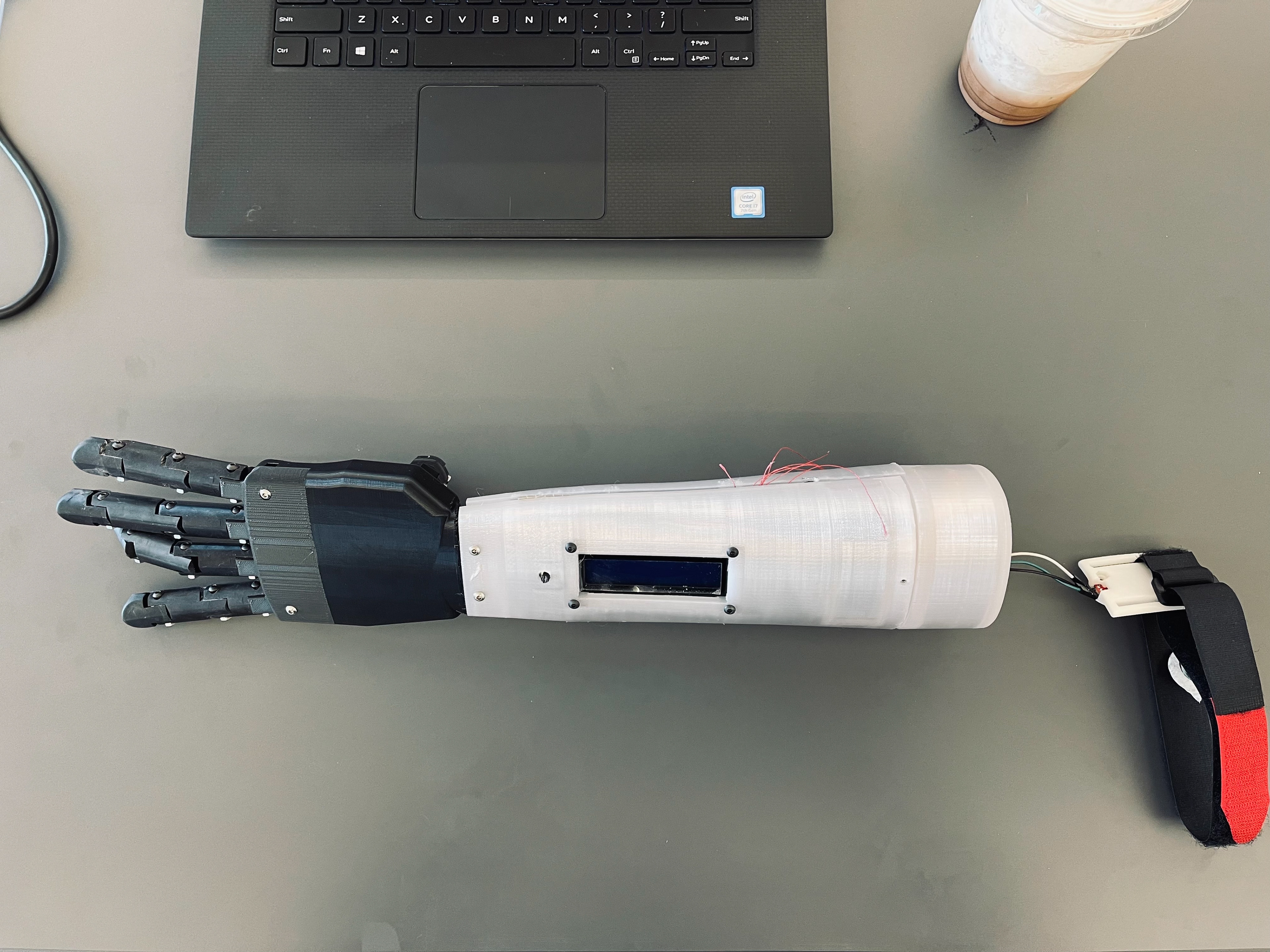
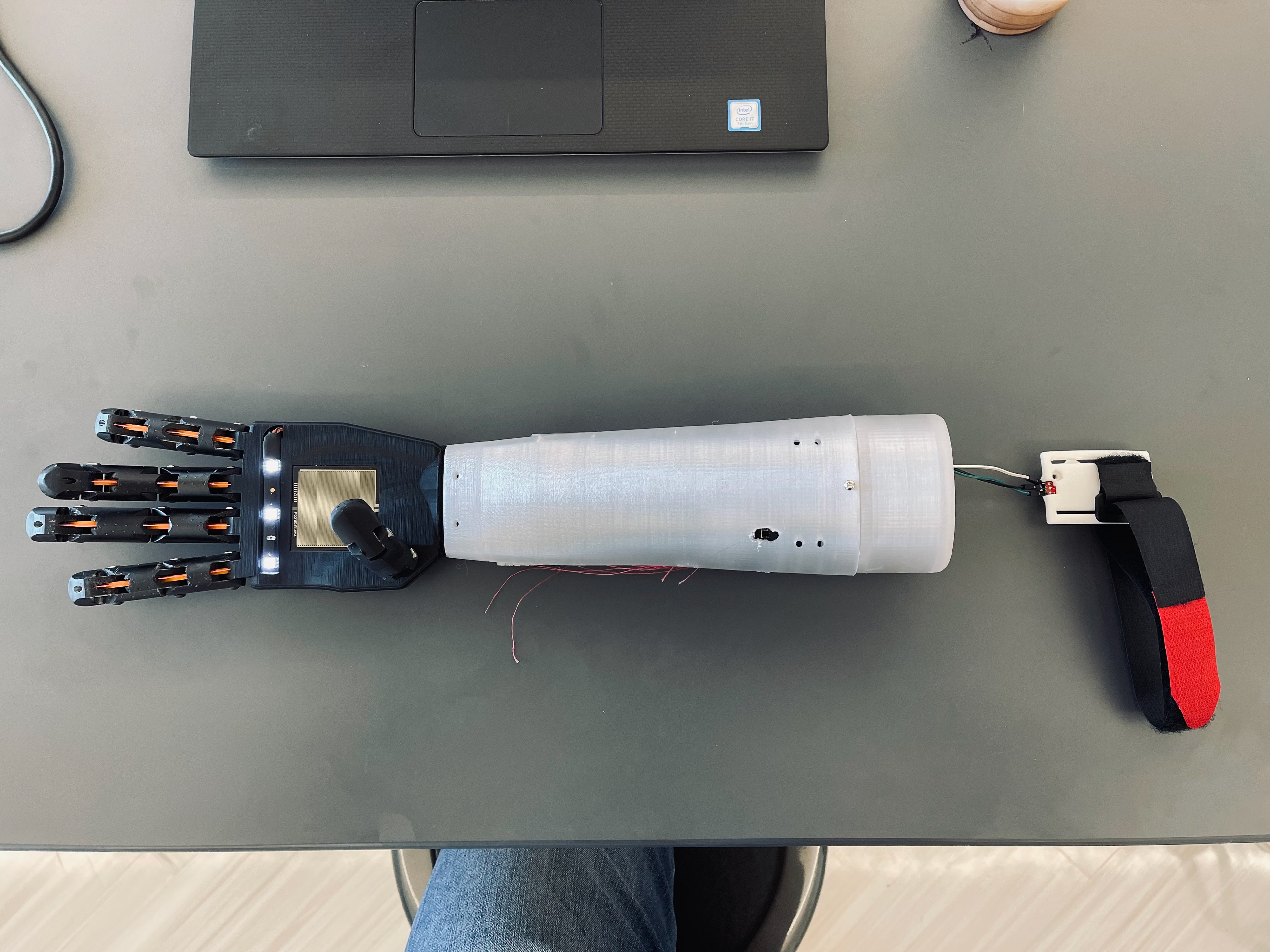
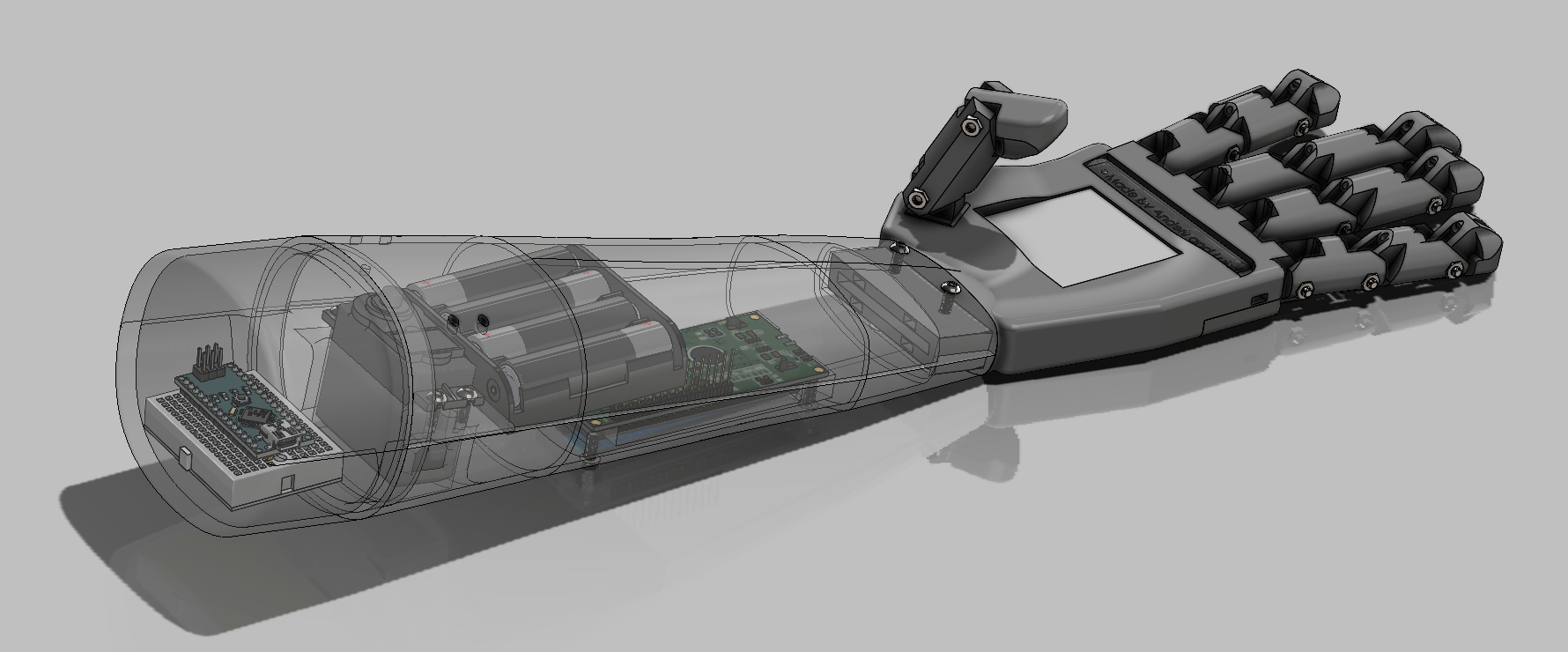
Summary: Engineered a below-elbow prosthetic system that translates muscle signals from the user's bicep into intuitive hand movements through myoelectric control. The system integrates an EMG sensor to detect muscle signals, servo motors connected to a wire-based actuation system for finger movement, and a load cell providing grip force measurement for haptic feedback. Using an Arduino Nano microcontroller, the battery-powered design features 3D printed components and an LCD interface displaying real-time grip strength and muscle voltage. The project demonstrates practical application of mechatronics to create an assistive device that restores functionality for below-elbow amputations.
Team: Luke Placzek and Anders Lind in WSU ME 401 (Mechatronics)